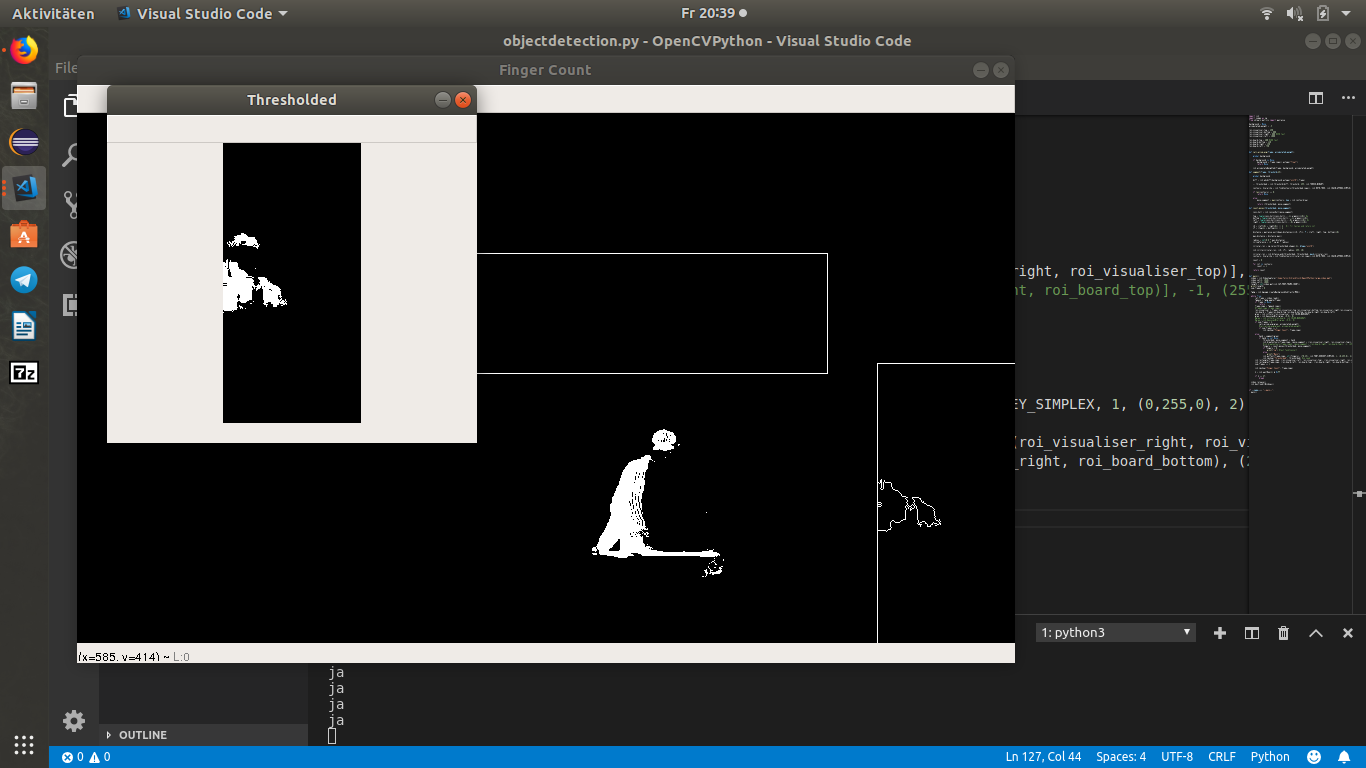
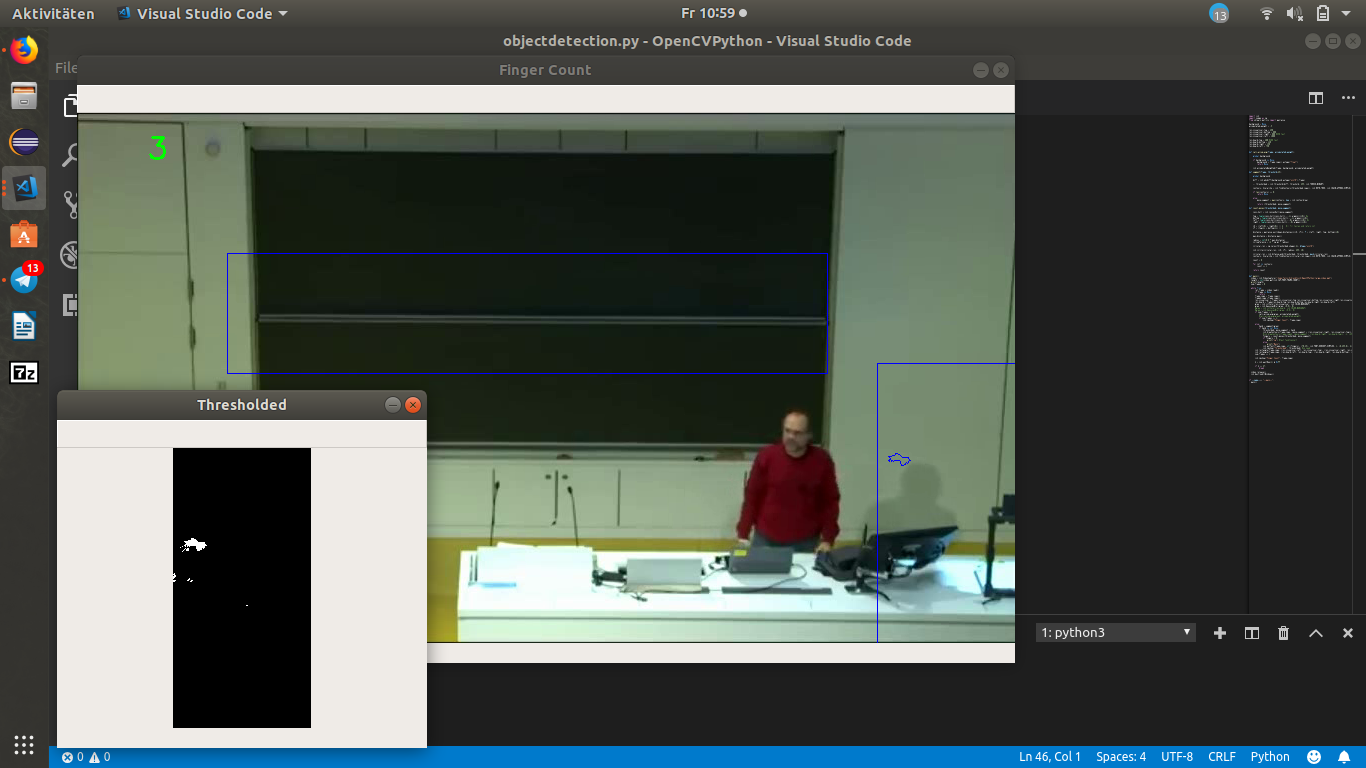
Ziel: es soll erkannt werden wenn die Person sich in einem der beiden Region of Interest s befindet (die Person muss nicht komplett drin stehen)
Das funktioniert soweit auch allerdings wird selbst sein Schatten erkannt was natürlich nicht sein soll.
Hat da jmd ein Tipp für mich oder eine alternative Idee ?
Code:
Code: Alles auswählen
import cv2
import numpy as np
from sklearn.metrics import pairwise
background = None
accumulated_weight = -5
roi_visualiser_top = 250
roi_visualiser_bottom = 600
roi_visualiser_right = 800 #350 test
roi_visualiser_left = 1000
roi_board_top = 260 #400 test
roi_board_bottom = 140
roi_board_right = 150
roi_board_left = 750
def calc_accum_avg(frame, accumulated_weight):
global background
if background is None:
background = frame.copy().astype("float")
return None
cv2.accumulateWeighted(frame, background, accumulated_weight)
def segment(frame, threshold=25):
global background
diff = cv2.absdiff(background.astype("uint8"),frame)
_, thresholded = cv2.threshold(diff, threshold, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresholded.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
if len(contours) == 0:
return None
else:
move_segment = max(contours, key = cv2.contourArea)
return (thresholded, move_segment)
def count_moves(thresholded, move_segment):
conv_hull = cv2.convexHull(move_segment)
top = tuple(conv_hull[conv_hull[:,:,1].argmin()][0]) #y
bottom = tuple(conv_hull[conv_hull[:,:,1].argmax()][0])
left = tuple(conv_hull[conv_hull[:,:,0].argmin()][0]) #x
right = tuple(conv_hull[conv_hull[:,:,0].argmax()][0])
cX = (left[0] + right[0]) // 2 #// für teilen und return int
cY = (top[1] + bottom[1]) // 2
distance = pairwise.euclidean_distances([(cX, cY)], Y = [left, right, top, bottom])[0]
max_distance = distance.max()
radius = int(0.8 * max_distance)
circumference = (2 * np.pi * radius)
circular_roi = np.zeros(thresholded.shape[:2], dtype="uint8")
cv2.circle(circular_roi, (cX, cY), radius, 255, 10)
circular_roi = cv2.bitwise_and(thresholded, thresholded, mask=circular_roi)
contours, hierarchy = cv2.findContours(circular_roi.copy(),cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
count = 0
for cnt in contours:
count += 1
return count
def main():
video = cv2.VideoCapture("/home/felix/Schreibtisch/OpenCVPython/large_video.mp4")
length = int(video.get(cv2.CAP_PROP_FRAME_COUNT))
print(length)
num_frames = 0
while True:
ret,frame = video.read()
if frame is None:
return
frame_copy = frame.copy()
frame2_copy =frame.copy()
roi_visualiser = frame[roi_visualiser_top:roi_visualiser_bottom,roi_visualiser_right:roi_visualiser_left]
roi_board = frame[roi_board_top:roi_board_bottom,roi_board_right:roi_board_left]
gray = cv2.cvtColor(roi_visualiser, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (9,9), 0)
#gray = cv2.cvtColor(roi_board, cv2.COLOR_BGR2GRAY)
#gray = cv2.GaussianBlur(gray, (9,9), 0)
if num_frames < 2:
calc_accum_avg(gray, accumulated_weight)
#calc_accum_avg(gray2, accumulated_weight)
if num_frames <= 1:
cv2.imshow("Finger Count", frame_copy)
else:
hand = segment(gray)
if hand is not None:
thresholded, move_segment = hand
cv2.drawContours(frame_copy, [move_segment + (roi_visualiser_right, roi_visualiser_top)], -1, (255,0,0), 1)
#cv2.drawContours(frame_copy2, [move_segment + (roi_board_right, roi_board_top)], -1, (255,0,0), 1)
fingers = count_moves(thresholded, move_segment)
if fingers > 0:
print("ja") #test funktioniert
else:
print("Nein")
cv2.putText(frame_copy, str(fingers), (70,45), cv2.FONT_HERSHEY_SIMPLEX, 1, (0,255,0), 2) #no need
cv2.imshow("Thresholded", thresholded) #no need
cv2.rectangle(frame_copy, (roi_visualiser_left, roi_visualiser_top), (roi_visualiser_right, roi_visualiser_bottom), (255,0,0), 1)
cv2.rectangle(frame_copy, (roi_board_left, roi_board_top), (roi_board_right, roi_board_bottom), (255,0,0), 1)
num_frames += 1
cv2.imshow("Finger Count", frame_copy)
k = cv2.waitKey(1) & 0xFF
if k == 27:
break
video.release()
cv2.destroyAllWindows()
if __name__== "__main__":
main()